
Automotive Network & Cyber-physical Security
Bootstrapping Secure Communication for CAN/CAN-FD Bus
Modern vehicles rely on a fleet of electronic control units (ECUs) connected through one or more automotive communication networks, such as the CAN/CAN-FD bus, for real-time subsystem control. Originally developed for real-time onboard communication, these networks are heavily criticized for little-to-none security and the alarming susceptibility to intrusions. Eyeing on this security deficiency and recent standardization effort by AUTOSAR, we proposed a session key establishment scheme for CAN/CAN-FD bus, making innovative use of secret sharing, an efficient cryptographic primitive, for and bootstrapping communication security against injection/intrusion attacks. [Prototype souce code]
Signal-based Intrusion Detection for CAN Bus
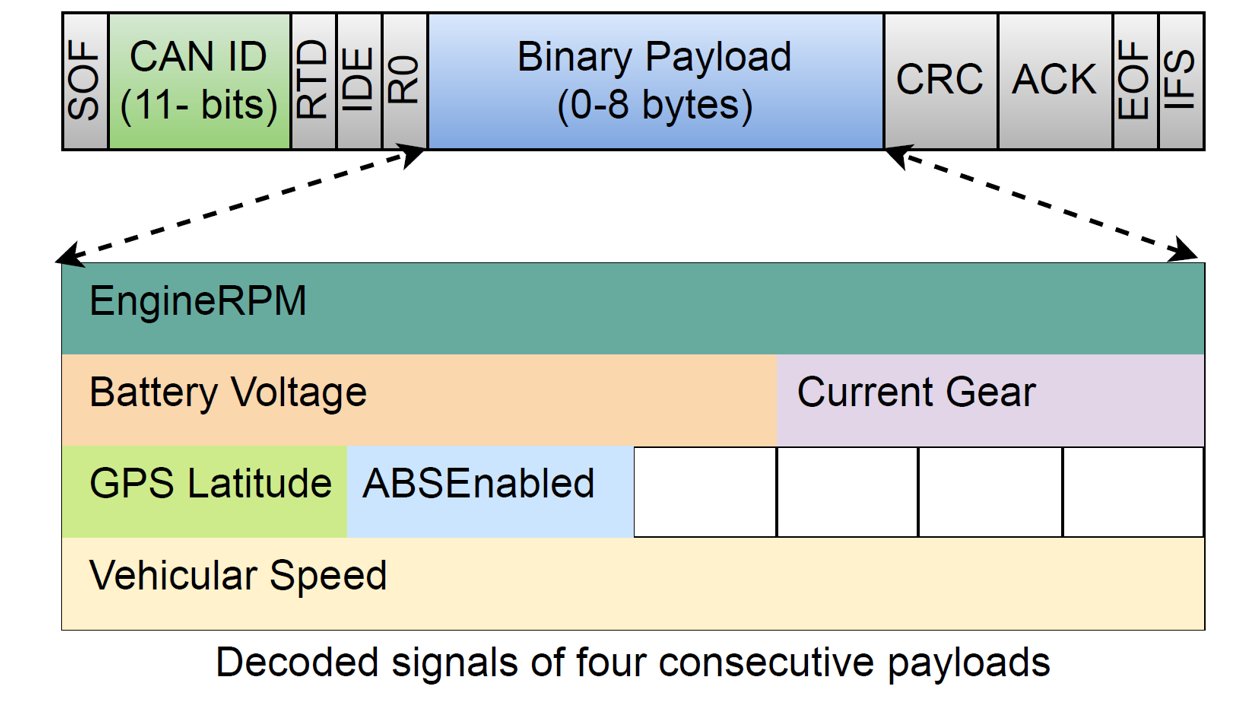
Recent attacks show that automotive buses are no longer secure. They can be accessed by attackers though an exposed wired or wireless interface. At the absence of a relible message authenticity/integrity mechanism (like the one mentioned above), advanced attackers can inject false data to the CAN signal level, while looking innocuous by the pattern/frequency of the CAN messages (i.e., the payload level). To fight against such intelligent attacks, we propose CANShield, a signal-based intrusion detection system (IDS) for the CAN bus. CANShield is comprised of a novel data processing pipeline that transforms signal-level CAN data into 2D time series data, and a deep autoencoder-based anomaly detection module that is responsive to various intrusion attacks of different time scales. Preliminary experimental results on a high-fidelity signal-based CAN attack dataset (provided by ORNL) show the high accuracy and responsiveness of CANShield in detecting five advanced signal-level intrusions.
Future Work
Our current defense methodology for automotive communication networks boils down to two lines of
defense: bootstrapping secure communication with cryptographic protocols (prevention as 1st line) and
machine-learning-based intrusion detection (detection as 2nd line). The core task in the prevention line
is to design practically secure mechanisms based on efficient cryptography oand secure hardware. The
core task of the detection line is to leverage multi-sensory data (potentially from different
subsystems) to formulate accurate and real-time characterization of unusual traces amid the vehicle's
routine operation.
◾ We will consider another line of defense, which would be resilience/fault-tolerance
mechanisms to quicky recover from the damaged state, potentially leveraging redundancy or distributed
consensus. As a relevant work of this line of defense, see our WiSec'23 paper
for how we leverage Byzantine-resilient data aggregation to secure clock synchronization in IoT
networks.
◾ We plan to extend the prevention-detection-resilience methodology to securing emergent CPSs
including both intra- and inter-vehicle networks.